Gravity compensation for serial robotic manipulators
robotics
mechanism design
control
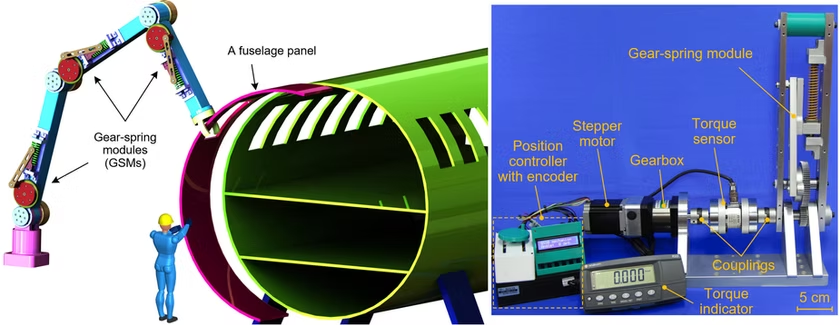
Gravity compensation using mechanical springs allows eliminating the gravitational effect on robotic manipulators, thereby reducing the actuation energy and improving accuracy, safety, and robot performance. In this research, a novel gravity compensation design, called the “gear-spring module (GSM)”, is proposed and installed on serial robotic manipulators for gravity compensation. The proposed GSM-based design is characterized by structure compactness, less assemblage effort, ease of modularization, and high performance of gravity compensation.