Featured in [1].
Back to topReferences
[1]
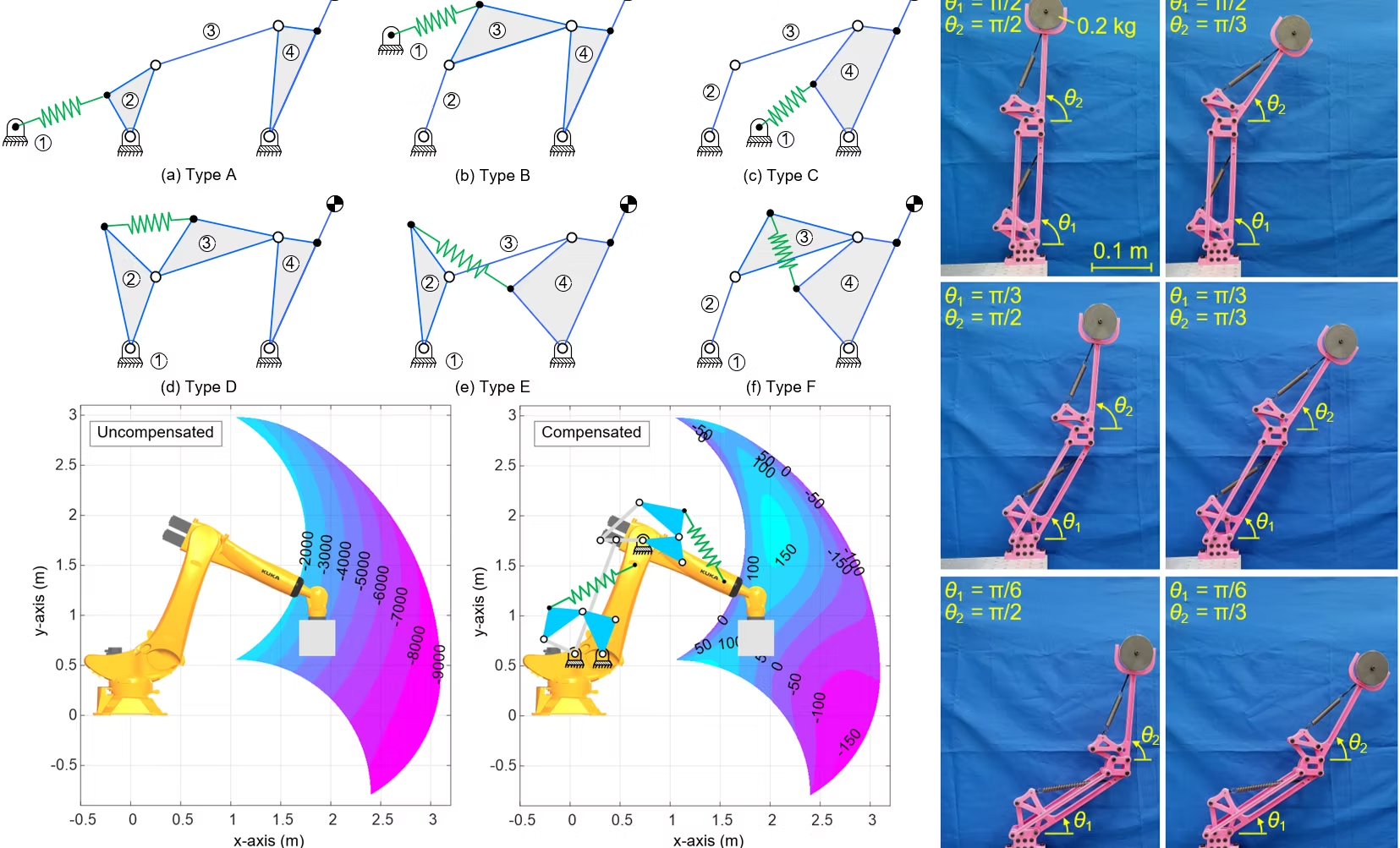
V. L. Nguyen, “A design approach for gravity compensators using planar four-bar mechanisms and a linear spring,” Mechanism and Machine Theory, vol. 172, p. 104770, 2022, doi: https://doi.org/10.1016/j.mechmachtheory.2022.104770.